计算机视觉基础 棋盘格与相机模型参数标定
计算机视觉是人工智能的重要分支,而相机标定是其中基础且关键的步骤。本文将围绕棋盘格的使用,介绍相机模型与参数标定的基本概念、原理和应用。
一、相机模型概述
在计算机视觉中,相机模型用于描述三维世界到二维图像的映射关系。常用的模型是针孔相机模型,它通过内参(如焦距、主点坐标)和外参(如旋转矩阵、平移向量)来定义。理想情况下,相机遵循线性投影,但实际相机存在透镜畸变等非线性因素,需通过标定来校正。
二、棋盘格在相机标定中的作用
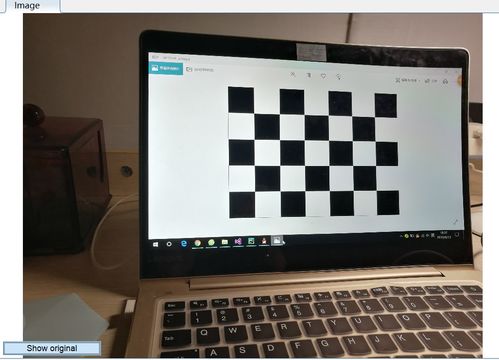
棋盘格是一种常用的标定模板,由黑白方格交替组成,其角点(方格交点)在三维空间中具有精确的已知坐标。通过拍摄多张棋盘格图像,可以提取这些角点的图像坐标,从而建立三维点与二维点的对应关系。棋盘格的规则结构简化了特征检测,提高了标定精度。
三、相机参数标定方法
标定过程主要包括以下步骤:采集多张不同视角的棋盘格图像;使用算法(如OpenCV中的函数)检测角点位置;然后,基于相机模型求解内参和外参,通常采用张正友标定法等优化方法;评估标定结果,如重投影误差,以确保准确性。内参包括焦距(fx, fy)、主点(cx, cy)和畸变系数(径向和切向畸变),外参描述相机相对于世界坐标系的位置和方向。
四、应用与意义
相机标定在机器人导航、三维重建、增强现实等领域至关重要。例如,在自动驾驶中,标定后的相机能准确感知环境距离;在工业检测中,可纠正图像畸变,提高测量精度。通过棋盘格标定,我们能够将图像数据转换为真实世界的几何信息,为后续视觉任务奠定基础。
掌握棋盘格和相机模型标定是计算机视觉学习的核心内容。实践时,建议使用工具如OpenCV进行实验,以深入理解参数影响。随着深度学习发展,标定方法不断优化,但传统方法仍具有重要价值。
如若转载,请注明出处:http://www.hf2sdnhs.com/product/12.html
更新时间:2025-11-29 14:04:45